Robotica Creativa e disabilità visiva
![La Robotica Creativa, così come si è venuta strutturando nella didattica della Scuola in Ospedale, risulta essere una disciplina estremamente “concreta”, che trova nel “fare” il suo punto di partenza; il “fare” come principio generatore di un atto creativo che, attraverso l’assemblaggio di materiali “concreti”, genera artefatti cognitivi estremamente “creativi”. Nel corso dell’anno scolastico 2010/2011, si è approcciata la disabilità visiva con tale disciplina, proprio perché essa procede, nel suo fare operativo, dal “particolare” dell’oggetto, del pezzo assemblabile, per arrivare […]](http://www.educationduepuntozero.it/wp-content/uploads/2012/04/i_nappi4_big.jpg)
articoli correlati
La robotica creativa procede dal particolare dell’oggetto, del pezzo assemblabile, all’unità composita dell’artefatto creativo, sintesi concreta delle varie parti. È cioè analoga alla percezione tattile, che arriva all’universale attraverso il particolare.



La Robotica Creativa, così come si è venuta strutturando nella didattica della Scuola in Ospedale, risulta essere una disciplina estremamente “concreta”, che trova nel “fare” il suo punto di partenza; il “fare” come principio generatore di un atto creativo che, attraverso l’assemblaggio di materiali “concreti”, genera artefatti cognitivi estremamente “creativi”. Nel corso dell’anno scolastico 2010/2011, si è approcciata la disabilità visiva con tale disciplina, proprio perché essa procede, nel suo fare operativo, dal “particolare” dell’oggetto, del pezzo assemblabile, per arrivare all’unità composita dell’artefatto creativo, quale “sintesi concreta” delle varie parti, conseguenza ultima di un processo articolato e complesso, che presenta modalità analoghe a quelle proprie della percezione tattile, la quale, attraverso il “particolare” (molteplicità dei dati sensibili percepiti dal tatto), arriva all’”universale” (sintesi dei dati sensibili in un’immagine mentale).
La vista, come l’olfatto e l’udito, è un senso che agisce “a distanza”. Mentre il tatto ha la sua massima distanza con “il braccio”, la vista sa cogliere le minime sfumature, le minime differenze e anche la “forma”, pur operando su due dimensioni; è il cervello, che unendole crea la “profondità”. Il tatto, al contrario, percepisce la terza dimensione, anche se non la globalità, che è prerogativa della vista. Grazie alla vista, noi abbiamo una percezione, inizialmente, globale, del “tutto”, poi, in un secondo momento, scendiamo a notare il “particolare”, il “dettaglio”; per il cieco è esattamente l’opposto: prima tocca, sente apticamente (la percezione aptica consente di riconoscere un oggetto toccandolo, attraverso la combinazione delle informazioni ricevute dal senso del tatto e dai propriorecettori ,che permettono la percezione del movimento e della posizione, nello spazio, del proprio corpo.) il particolare e poi passa al “tutto”, all’insieme, attraverso un procedimento analitico, basato sulla memoria (memoria sequenziale) e l’astrazione, che richiede un notevole sforzo intellettuale. “Toccare è osservare con le mani, è un’esperienza complessa che richiede al non vedente attenzione, concentrazione, memoria, coordinamento nei movimenti; bisogna toccare con le mani aperte per percepire le dimensioni, con tutta la mano per conoscere le superfici, con le dita per conoscere i contorni della figura, con la punta dell’indice per rintracciare i particolari, con i polpastrelli dell’indice e pollice per conoscere gli spessori” (http://www.allestimento-tattile.it/index.asp). Nella formazione del bambino cieco, i “sensi residui” svolgono un ruolo di fondamentale importanza.

L’udito, essendo un senso che agisce a distanza, almeno inizialmente, non può essere di grande aiuto per l’acquisizione di informazioni dal mondo circostante, che rimarrebbero, pertanto, troppo astratte e prive di contenuti precisi, acquistando un senso solo dopo l’esperienza tattile. Il canale sensoriale privilegiato, attraverso cui i ciechi ricevono informazioni precise sulla realtà oggettuale, è sicuramente il tatto o, più precisamente, il tatto “in movimento”: ecco perché, per i non vedenti, si parla di “percezione aptico-cinestetica”. Su questo tipo di percezione bisogna soffermarsi debitamente, anche in relazione al tipo di stimolo fornito dalla Robotica Creativa in tal senso. Perché si parla di percezione aptica o tattilo- cinestetica? Per conoscere l’oggetto, le mani devono muoversi ed esplorarne i contorni, le dimensioni e la texture (“percezione aptica”, dal greco hàptomai = sfiorare, percezione aptico-cinestetica perché deriva dallo sfioramento tattile in movimento.). Il tatto, che privilegia le qualità materiali e funzionali degli oggetti, ha il suo organo privilegiato nella mano: mentre si distribuisce in tutto il corpo avvertendoci della presenza di oggetti, con le mani (specialmente i polpastrelli delle dita. Nei polpastrelli delle dita risiedono i ricettori tattili, i corpuscoli di Meissner, in una proporzione di 108 sul polpastrello del dito indice, rispetto agli oltre 400.000 ricettori visivi presenti sulla retina dell’occhio) raggiunge una funzione percettivo-cognitiva.

Il campo percettivo tattile, purtroppo, è molto ristretto, concreto, portato alla percezione delle cose per “quelle che sono” e può conoscere l’ambiente circostante soltanto attraverso una sequenza di esplorazioni successive, che gli forniranno “immagini” o “mappe” mentali”, luogo di una sintesi strutturale. Con pazienti divenuti ciechi, come nel caso in cui si è operato, l’intervento riabilitativo si presenta più complesso, proprio perché una persona diventata cieca è legata ai suoi ricordi visivi, dai quali non riesce a svincolarsi; non prenderà mai coscienza dell’efficacia degli strumenti percettivi, continuando a essere un “ex-vedente”. Proprio in questo caso, la Robotica Creativa ci è d’aiuto: la percezione tattile, puntiforme, così come è stata intuita sorprendentemente da Braille, trova difficoltà ad essere percepita (educata) in chi non vi è allenato dalla nascita; la continua stimolazione dei recettori tattili, attraverso materiali di uso non consueto e promiscui può stimolare più versanti, da quello tattile e quello immaginativo. Bisogna esercitarsi a percepire ciò che non è facilmente desumibile; bisogna muoversi in uno spazio limitato. Ai fini della riuscita dell’attività proposta, è stato importante delimitare il “campo di azione” del bambino non vedente, per favorirne la “memoria motoria” e l’orientamento”, suddividendo i materiali categorialmente: così facendo, si è stimolata anche la sua sensibilità cinestetica, che rappresenta l’unica fonte d’informazione sulla qualità del gesto durante la sua esecuzione. Le nozioni spaziali vengono acquisite dal bambino vedente secondo una successione cronologica. Secondo Piaget, la prima tappa dell’ organizzazione spaziale nel bambino è quella “topologica”, che riguarda i rapporti di posizione tra gli oggetti (contatto/separazione, inclusione/esclusione), seguita da quella “metrica”, riguardante i rapporti tra le diverse parti di un oggetto o fra diversi oggetti, e da quella” proiettiva” (i rapporti spaziali variano con il variare del punto di osservazione e del modo di osservarli). Per il raggiungimento della prima tappa è necessario far uso di schemi di riferimento “propriocettivi”, che si costituiscono attraverso l’esperienza cinestetica e col movimento; nel secondo caso si utilizzano schemi di natura “esterocettiva”, che si costituiscono con l’esperienza legata agli oggetti che ci circondano. I vedenti dispongono di mappe cognitive basate su immagini visive, i ciechi utilizzano mappe mentali che si sono costituite sulla base di immagini tattili. È proprio nel quadro abilitativo dei sensi residui, in particolare del tatto, che si inscrive l’importanza della Robotica Creativa nei casi di deficit visivo. Per l’orientamento nello spazio sono necessari una serie di prerequisiti (conoscenza della corporeità, acquisizione dello schema corporeo, educazione del senso tattile, conoscenza dei rapporti topologici, proiettivi ed euclidei, capacità di localizzazione uditiva, olfattiva ed anemestesica, capacità attentiva e di memoria, conoscenza del linguaggio per identificare gli oggetti ecc.) che vengono promossi da questa disciplina. Anche ai fini dell’autonomia motoria del non vedente, è fondamentale promuovere le abilità aptico-cinestetiche, proprie del tatto-in-movimento, che sono anche alla base della struttura stessa del Braille. Una buona conoscenza del sistema di codifica per non vedenti aiuta a rappresentarsi mentalmente gli spazi e i loro punti di riferimento, proprio perché favorisce una organizzazione mentale “per punti di riferimento”, con un’esatta collocazione nello spazio.

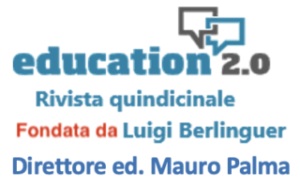
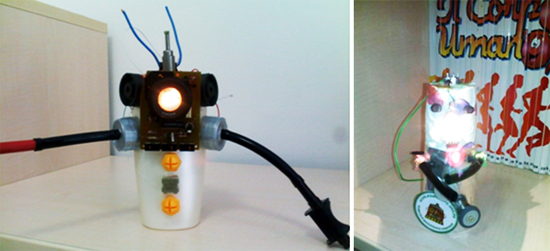
Al fine di mantenere vivo l’uso del Braille – sia per l’importanza che riveste nell’ambito della rappresentazione spaziale dei soggetti con deficit visivo, sia perché è un tipo di codifica che, se non è sottoposta a un costante esercizio, viene facilmente dimenticata, sia perché, sulla base della sua struttura puntiforme, stimola i recettori tattili (canali di Messner) di uguale conformazione – si è fatto uso dell’apposita etichettatrice, per la realizzazione delle scritte da apporre sui barattoli dedicati alla classificazione dei materiali robotici; nei robottini creativi, invece, la consueta codifica puntiforme del linguaggio per non vedenti, utilizzata per la scrittura di singole lettere, è stata resa mediante tasti del telefono o da condensatori (vedasi foto).

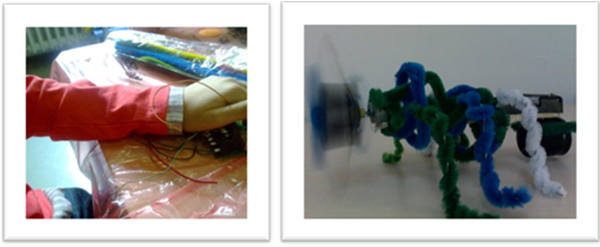
La Robotica Creativa. è stata applicata alla disabilità visiva in tutta le sua estensione metodologica, che va dallo “smontaggio creativo” alla “meccanizzazione” dei suoi artefatti.

Essa, al di là dei contenuti disciplinari che è in grado di mediare (elettronica, fisica, chimica ecc.), si è dimostrata in grado di soddisfare i criteri riabilitativi che sono entrati a far parte della sua definizione.
***
Scarica l’articolo completo in formato PDF.
***
La scuola in ospedale Gaslini di Genova fa parte dei progetti Soave Kids: http://blog.edidablog.it/blogs//index.php?blog=87 e Pinocchio 2.0 http://blog.edidablog.it/blogs//index.php?blog=275 e http://www.facebook.com/group.php?gid=139204519436108
Immacolata Nappi

 Share
Share

{kind=link}